Storytelling#2 - Bio-Fab
April, 2013Locomotion mechanism of living organisms is beautiful, yet mysterious.
me is a multi-directional locomotion machine fabricated out of soft materials that attempts to illustrate the mechanisms of a cell and a trilobite. It explores the potential of using inflatable materials and pneumatic system to bring organic properties to machines and to facilitate safe man-machine interaction.
Inspired by the cell locomotion that follows the process of protrusion, adhesion, de-adhesion, and movement (The Forces Behind Cell Movement by Revathi Ananthakrishnan), me is fabricated out of super-stretchy silicone that allows it to inflate dynamically with a pneumatic actuator. Solenoid valves are computer controlled to achieve its movement. The material is sturdy enough to exhibit force to pull its body forward. The fabrication technique was studied from Multigait Soft Robot by Robert F. Shepherd.
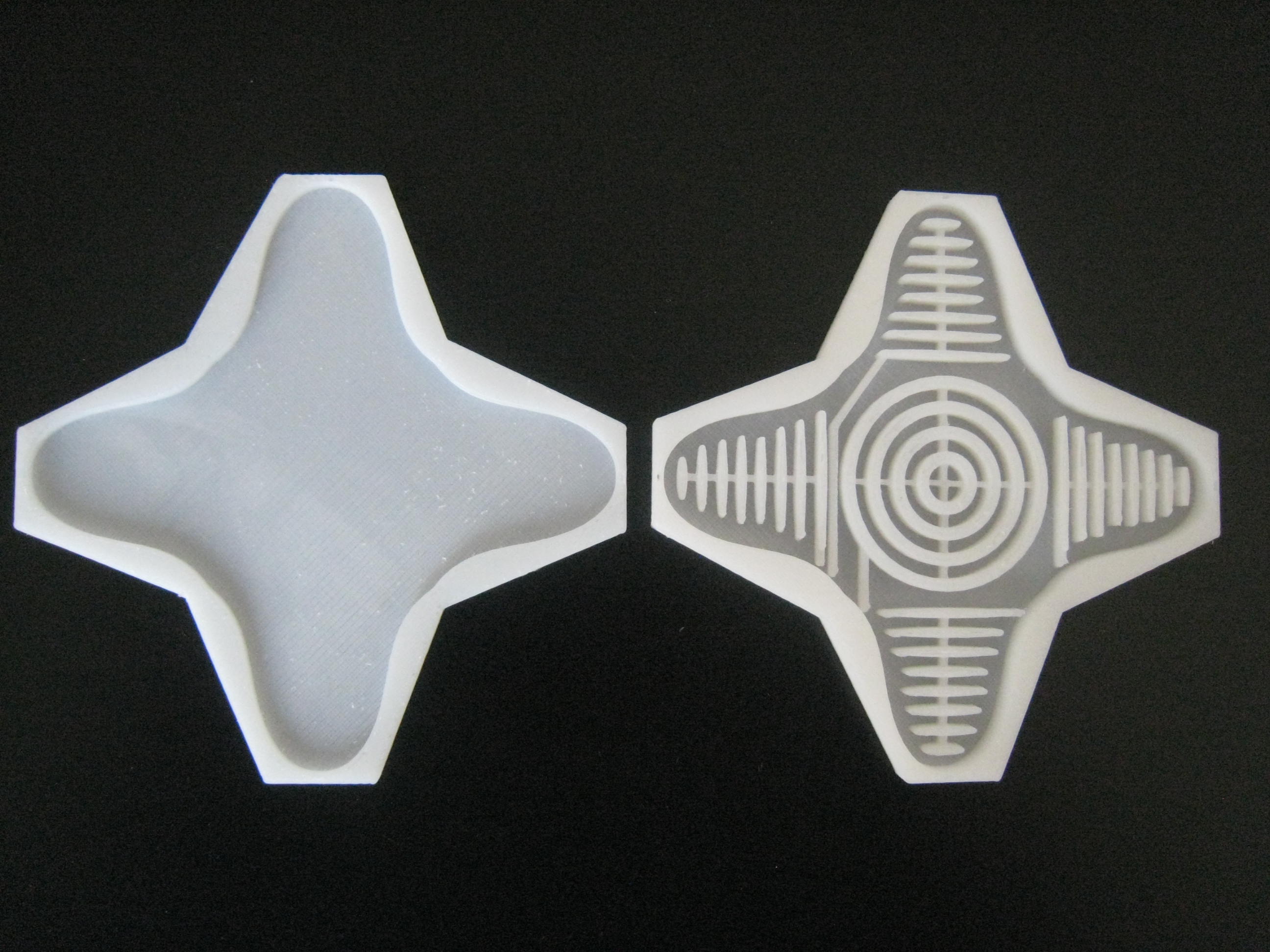
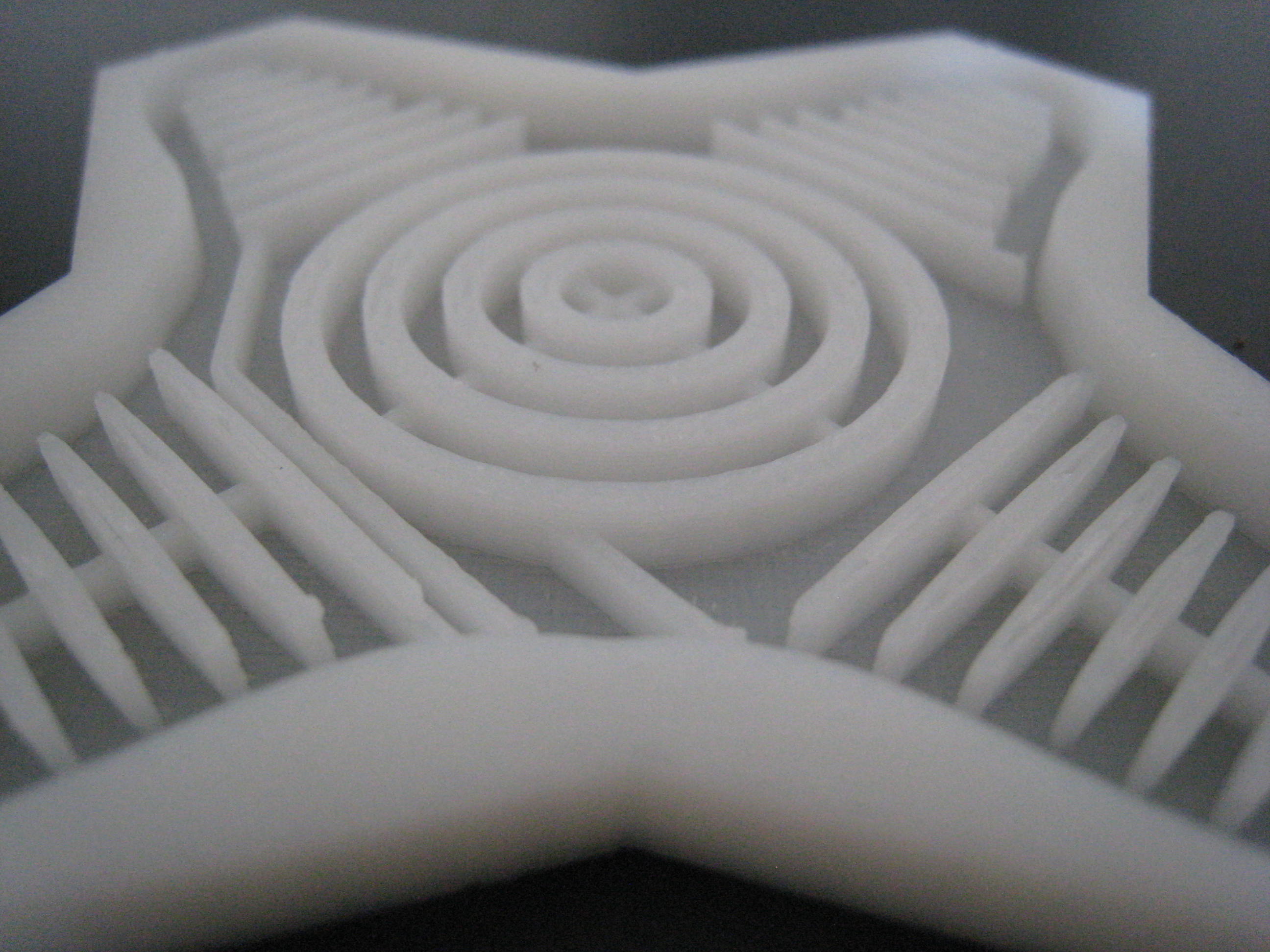
me has a circular shape with short legs on 4 points, which allows it to easily move in any directions. The pattern formed inside is thought-out in order to curl-up its legs and body. The middle region is patterned in circular so that the body is symmetrically inflated, which is essential in multi-directional locomotion. Lastly, the inner pattern is interestingly similar to that of trilobite, an extinct marine arthropod.
Imagine a scenario where people are peering into abnormal sea creatures at an aquarium. me is caged inside a transparent cube in order to produce the similar effect. It is striving to be out of the cube and to be free from the tubes, though it has not realized that the tubes are me's lifeline.

3D printed molds of a patterned layer and a base layer:



© 2018 Daiki Itoh