Portable Haptic Exoskeleton
November, 2014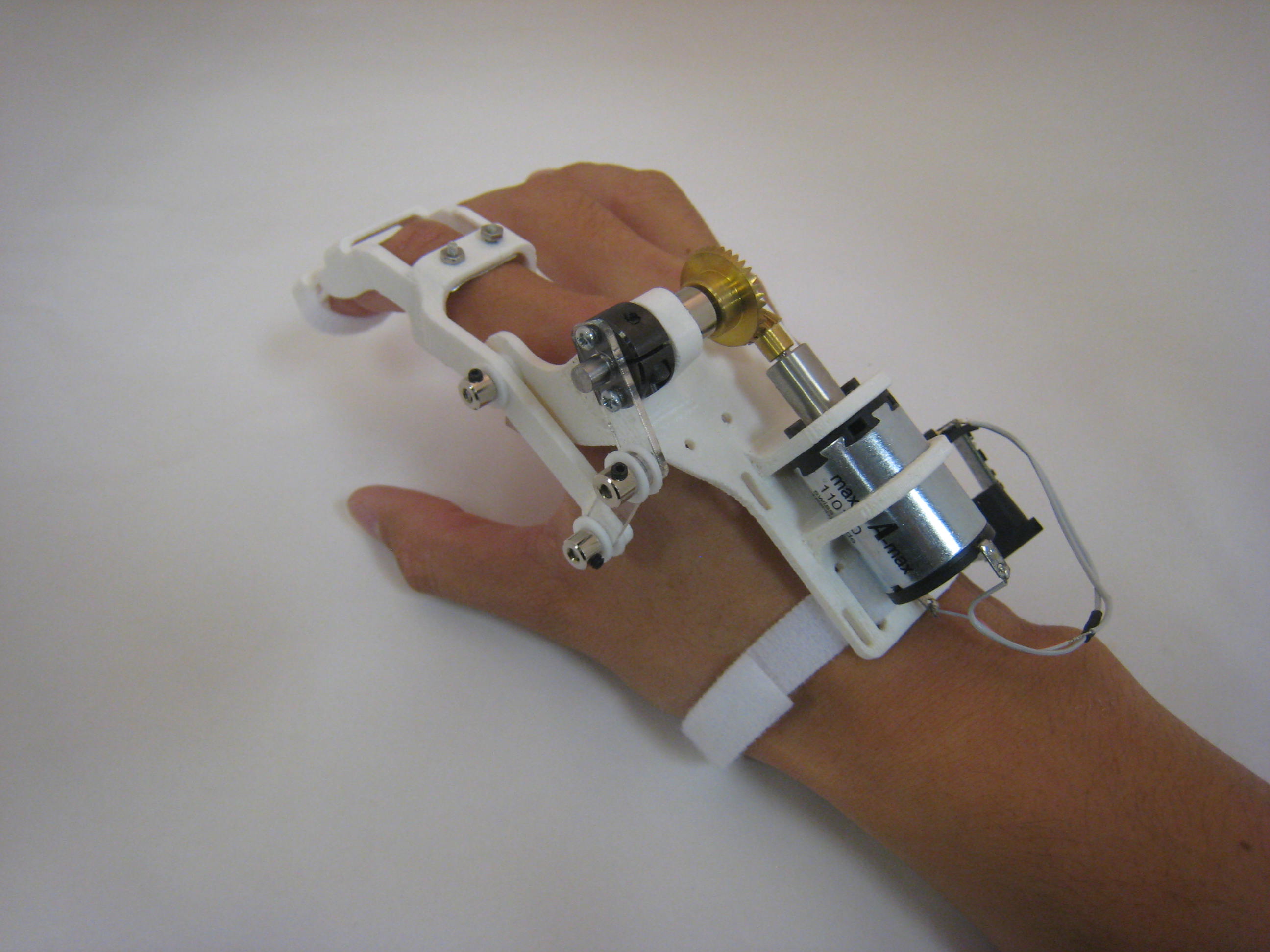
BACKGROUND Today in computing, there is a radical shift from 2D to 3D interface. Emerging platforms such as 3D printers, VR / AR headsets, and drones are pushing forward the 3D content creations. We are at a turning point of transitioning from screen-based devices to a one-to-one scale physically-embodied digital information.
Such evolution in computing indicates the necessity of interacting with digital information and objects in the manner we interact physically. Though gestural input method using a depth camera or motion capture sensors has caught up, a challenge still remains - how can we gain physical feedback to minimize the gap of digital and physical interaction?
Solutions that exist today can be categorized by the feedback type and the device type as shown below:

To achieve hands-free interaction, the sweet spot is at the intersection of wearable and force or vibratory feedback. Force feedback is an apt choice for assisting hand manipualtions rather than limiting to pseudo-haptics generated by visual and vibratory feedback. Force interaction created between the user's hands and a virtual object mitigates the mental stress of positioning the fingers and enables rapid grabbing and releasing. The benefits of force feedback has been academically proven in robotic surgery (e.g., reduced applied force and cognitive workload during surgery) and well-explained in a thesis presented by Christopher Wagner. Vibratory feedback, using any sort of techniques including gyro-effect and electro-active polymer, is stimulation which could be useful for texture simulation, navigation, or enhanced gaming, but not quite for physical actions.
In general, force feedback devices have been traditionally targeted for the academic, medical, military, and industrial markets and are typically large, stationary, and very expensive machines. Exoskeleton covers both wearable and force feedback, but the current models on market are bulky and intrusive. Therefore another problem that needs to be tackled is how should wearable force feedback device be designed and engineered so that it would not impede the user's movements?

DESIGN+ENGINEERING APPROACH
There are 4 key considerations to achieve user-friendly design:
- functionality (amount of force, degrees of freedom, response time, power consumption)
- size/weight
- wearability (the device should not impede hand movements)
- cost
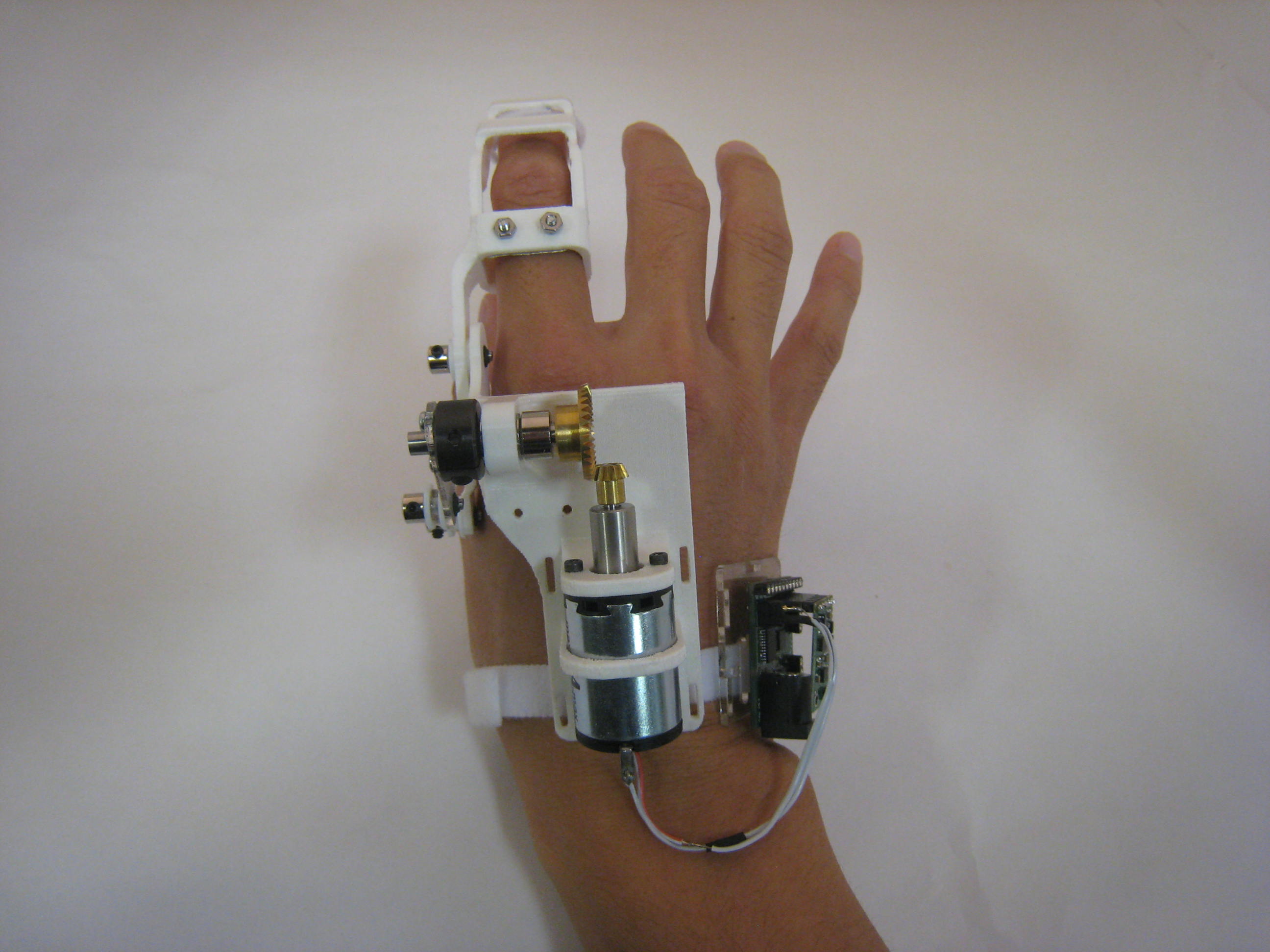
As the initial prototype, a backdrivable motor was chosen for an actuator. Of other actuation methods such as muscle wire and pneumatics, motors satisfy the above requirements in practice. 3 different mechanical drive systems, cable, belt, and gears, were tested. Nearly 6 months of iterating brainstorming, rapid prototyping of software and hardware, and user-testing were executed.
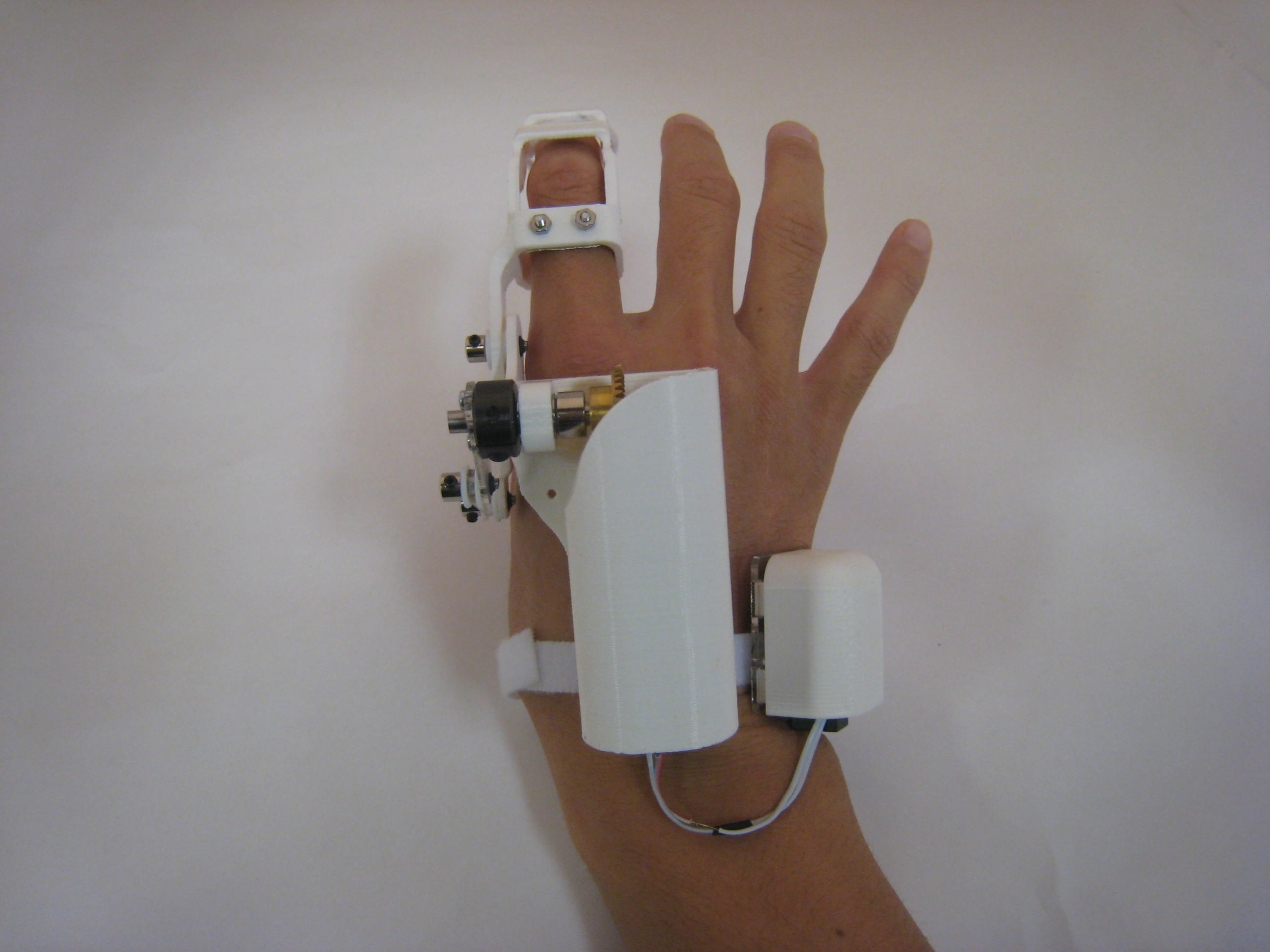
To minimize the intrusiveness of the device, the actuator and the electronics compactly fits on top of the hand. Extending the device beyond the wrist impedes the wrist movement. The device limits to a single actuator coupled per finger in order to mitigate its size, weight, and cost. Perpendicular feedback force is applied bidirectionally on a finger phalanx, which is indicated as an important design parameter for realistic force interaction in Human Grasp Choice and Robotic Grasp Analysis by Mark Cutkosky. The feedback is applied primarily on an index finger as it is the most frequently used finger for any hand activities. An experiment was made to set a stationary finger cap for a thumb to produce the feeling of pinching.
The actuator is computer controlled by an embedded microcontroller which communicates with a standalone computer to generate appropriate amount of force feedback based on the 3D physics simulation result. Inertial measurement unit and flex sensor are utilized for gestural input.
APPLICATIONS
Videos below demonstrate the following applications:
-
Immersive learning for anatomy education.
-
First person shooting game that mimics the various gun shoot feedback.
-
3D modeling as easy as shaping a play-doh.
1-DOF demo:
2-DOF demo:
FUTURE WORK This work achieved hands-free force interaction for assisting the manipulation of virtual 3D objects. Design choices were made to balance the realness of feedback and the device portability. There is a lot of potential for improvements in alternative actuation method such as shape deposition manufacturing with soft materials and tendon drive. The bio-inspired device that fits more naturally to the user hand might be a better choice for applying force feedback to a wider region of hand (e.g., minimum of 3 fingers, palm).
© 2018 Daiki Itoh